学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往:
《自动驾驶新人之旅》免费课程—> 传送门
《Apollo 社区开发者圆桌会》免费报名—>传送门
文章目录
前言
Planning%E4%BD%9C%E7%94%A8-toc" style="margin-left:40px;">Planning作用
Planning%E5%86%85%E5%AE%B9-toc" style="margin-left:40px;">Planning内容
Planning%E6%A8%A1%E5%BC%8F-toc" style="margin-left:40px;">Planning模式
总结
前言
见《自动驾驶学习笔记(十四)——感知算法》
见《自动驾驶学习笔记(十五)——交通灯识别》
见《自动驾驶学习笔记(十六)——目标跟踪》
见《自动驾驶学习笔记(十七)——视觉感知》
见《自动驾驶学习笔记(十八)——Lidar感知》
Planning%E4%BD%9C%E7%94%A8" style="margin-left:0;text-align:justify;">Planning作用

Routing模块输出的大概是一个路线,是街区或路段级别的。
Planning模块输出的是轨迹点,每个控制周期车辆应该到达的点。
Planning%E5%86%85%E5%AE%B9" style="margin-left:0;text-align:justify;">Planning内容
SL-路径规划:空间相关的状态变量(参考点坐标+朝向+转向曲率)。
goal = (x,y,θ,κ);ST-速度规划:时间相关的运动变量(转向角,速度,加速度)。
goal = (q,v,a);
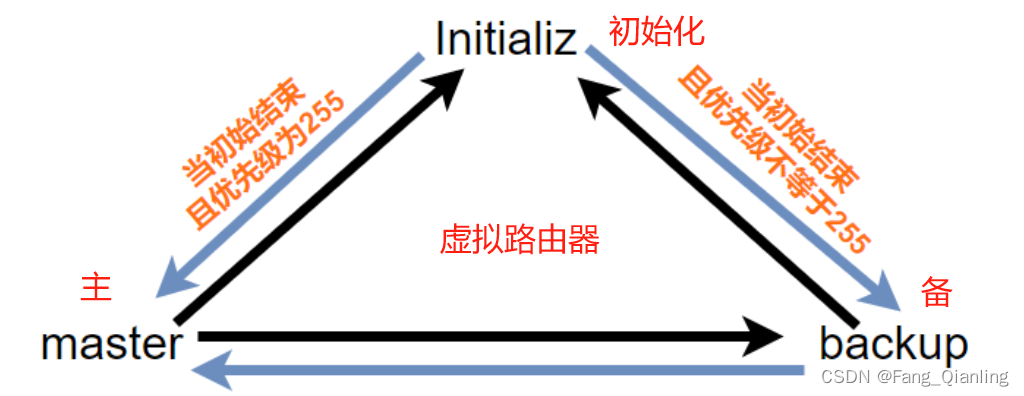
Planning%E6%A8%A1%E5%BC%8F" style="margin-left:0;text-align:justify;">Planning模式
Planning模块常见的工作模式,示例如下:

总结
以上就是本人在学习自动驾驶时,对所学课程的一些梳理和总结。后续还会分享另更多自动驾驶相关知识,欢迎评论区留言、点赞、收藏和关注,这些鼓励和支持都将成文本人持续分享的动力。
另外,如果有同在小伙伴,也正在学习或打算学习自动驾驶时,可以和我一同抱团学习,交流技术。
版权声明,原创文章,转载和引用请注明出处和链接,侵权必究!
文中部分图片来源自网络,若有侵权,联系立删。